Space rovers are unmanned, mobile probes designed to explore the surfaces of celestial bodies (planets, moons, asteroids), controlled from Earth or autonomously. They serve for geological analysis, searching for traces of life, and photographing the surroundings. Rovers study the chemical composition of rocks, atmospheric conditions, and look for signs of life while moving across difficult terrain. Due to extreme conditions (dust, radiation), rovers must be extremely durable, powered by solar batteries or nuclear sources (RTG).
The most well-known missions are carried out on Mars (e.g., Perseverance, Curiosity, Opportunity) and the Moon (LRV).
Lunar rovers:
The first were the Soviet Lunokhods, followed by the manned LRV (Lunar Roving Vehicle) used in the Apollo 15, 16, and 17 missions.
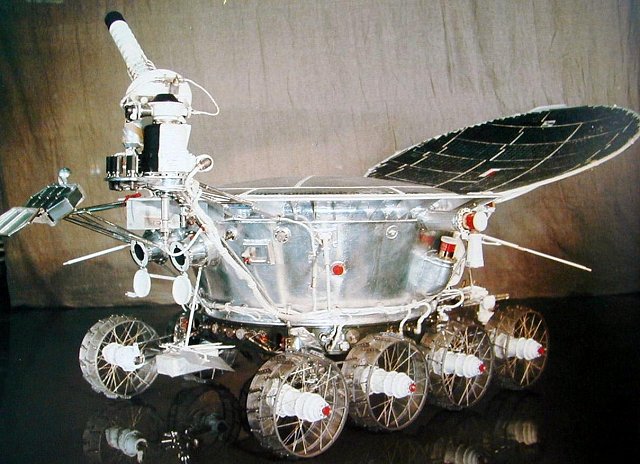
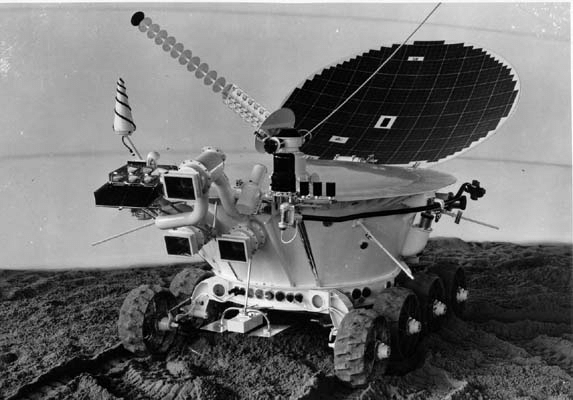
Lunokhod 1 – is a historic, the first in history remote-controlled rover that landed on another celestial body (the Moon) on November 17, 1970. It was an unmanned Soviet vehicle that revolutionized lunar research, operating significantly longer than expected. The vehicle had four gears: two forward and two reverse.
It could move at a speed of up to 2 km/h and was capable of climbing slopes with an inclination exceeding 45 degrees. A series of sensors constantly measured the tilt angles and wheel loads. If detected values exceeded the maximum, an automatic stop occurred. Maneuvers were not implemented using a typical steering gear, but by differentiating the rotational speed of the wheels located on opposite sides.
Here is the most important information about this mission:
Landing: November 17, 1970, in the Sea of Rains (Mare Imbrium) region.
Delivery: The rover was delivered by the Luna 17 probe.
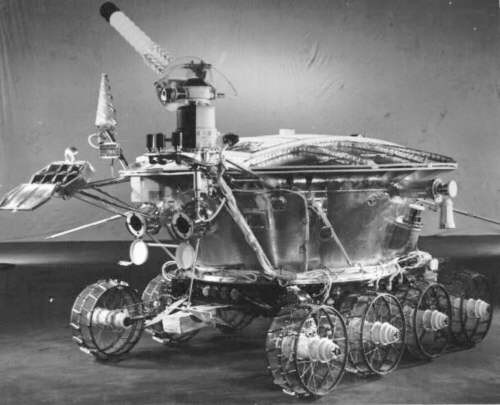
Construction: The vehicle had a “tub” with eight wheels, covered by a lid with solar cells. The lid closed for the lunar night, protecting the interior and providing thermal insulation.
Control: Lunokhod was controlled in real-time by a 5-person team of operators from Earth. Due to signal delays (several seconds), driving was difficult and required extraordinary precision.
Operating time: The rover was intended to operate for 3 months, but it conducted research for 11 months (until September 14, 1971; the mission was officially ended on October 4, 1971).
Achievements and distance: Lunokhod 1 traveled a total of over 10.5 km, transmitted over 20,000 television photos and 206 high-resolution panoramas.
Scientific research: The rover performed 25 soil analyses (X-ray spectrometer) and 500 soil strength measurements (penetrometer).
Laser experiment: The vehicle was equipped with a French laser reflector, thanks to which the distance to the Moon was measured from Earth with an accuracy of up to several meters.
It was often called the “lunar oddity with a lid” because of the characteristic lifting solar cover, resembling a lid.
Lunokhod 2 – was the second unmanned, Earth-controlled Soviet lunar rover, which landed on the Moon on January 15, 1973, as part of the Luna 21 mission. The mission ended on June 4. Although it operated for a much shorter time than its predecessor, it managed to cover a distance of 37 km and took 80,000 narrow-angle photos and 86 panoramas.
Here is key information about Lunokhod 2:
Mission goal: Scientific research of the Moon’s surface, including photography, soil (regolith) analysis, and radiation studies.
Construction: The vehicle weighed over 750 kg, had 8 wheels with independent electric drive, and drew energy from solar batteries.
Operation: It was radio-controlled by operators from Earth. It had a heating system using polonium-210 to survive freezing lunar nights.
Results: In less than 5 months of work, it transmitted 86 panoramas and 80,000 photos, covering a distance significantly greater than its predecessor, Lunokhod 1.
End of mission: It went down in history as one of the most effective rovers of that era, and its record for distance traveled on another celestial body was only broken by the Mars rover Opportunity.
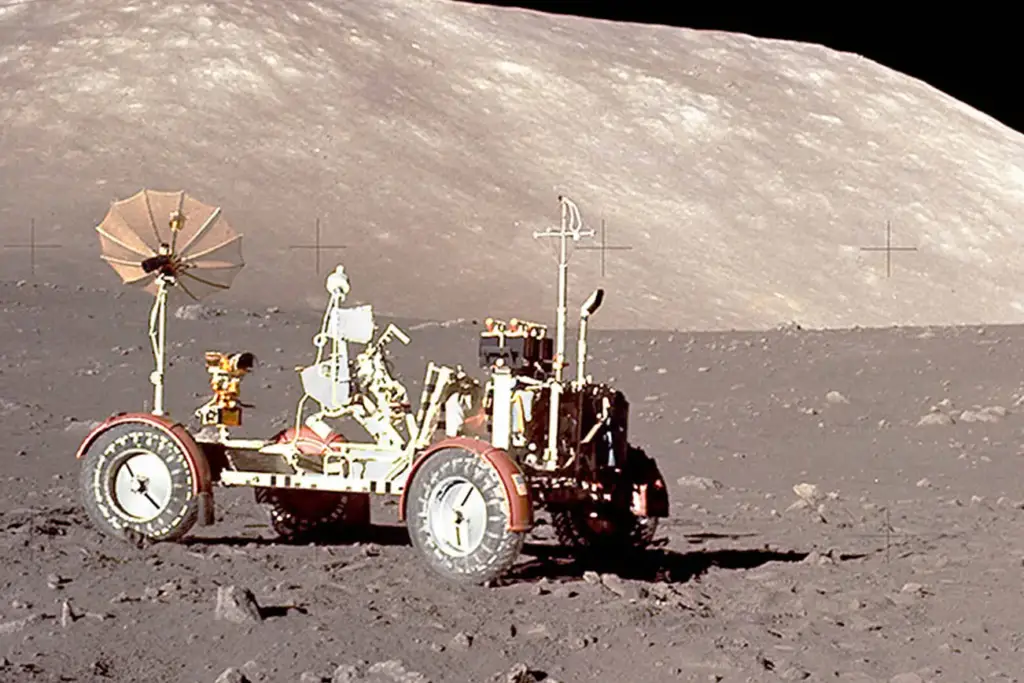
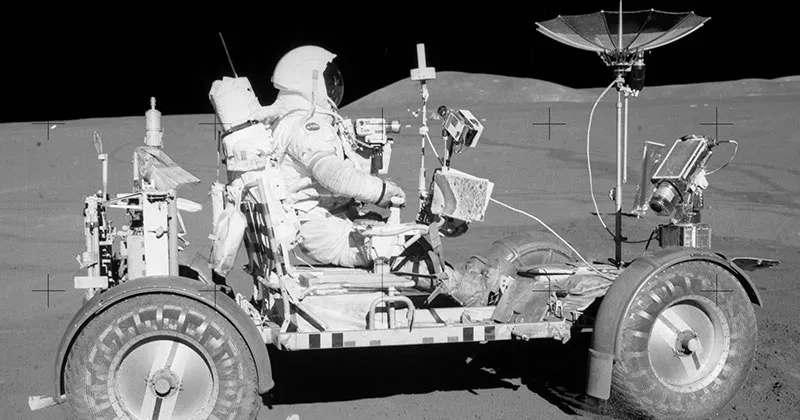
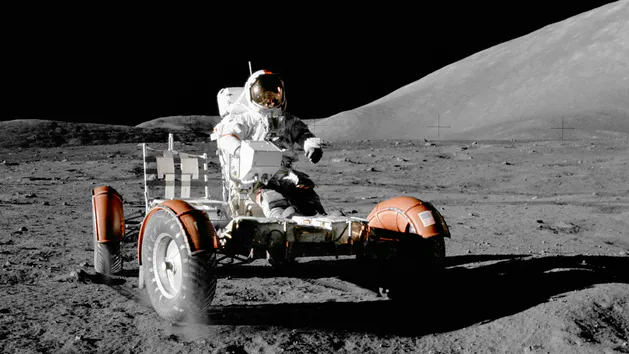
LRV (Lunar Roving Vehicle) – these are NASA vehicles often called “lunar rovers” or “lunar cars”. They were electric, manned wheeled vehicles used by NASA astronauts during the Apollo program missions (15, 16, and 17) in the years 1971-1972. Their main goal was to enable the exploration of much larger areas of the Moon than was possible on foot. Here is key information about LRV vehicles:
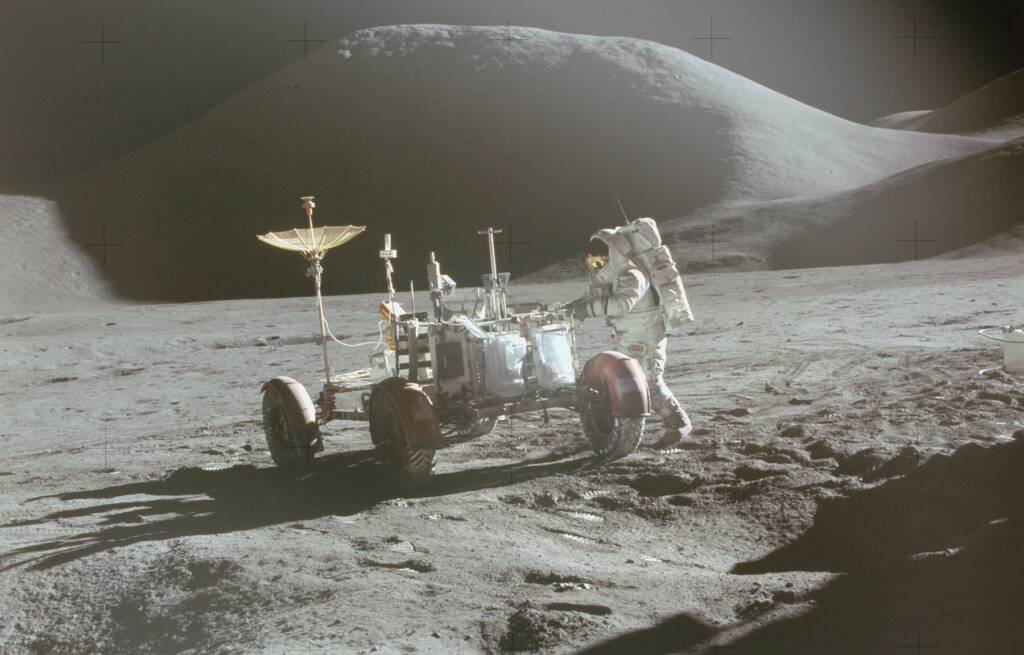
Application: The vehicles were used to transport two astronauts, their tools, scientific equipment, and lunar soil samples.
Construction: LRVs were lightweight vehicles with an aluminum chassis, foldable for transport in the lunar module. The wheels were made of wire mesh with titanium tires, which provided traction on loose regolith.
Drive: The vehicle was powered by silver-zinc batteries, and each of the four wheels had its own electric motor, allowing movement in difficult terrain.
Control: LRVs did not have a steering wheel but were controlled using a controller placed between the seats.
Missions: Three LRV rovers were used on the Moon:
Apollo 15 (July 1971) – the first vehicle used.
Apollo 16 (April 1972).
Apollo 17 (December 1972).
Performance: Maximum speed was about 13-17 km/h, and the range allowed for moving away from the lander to a safe distance.
LRVs were the first manned vehicles used on another celestial body.
Mars rovers:
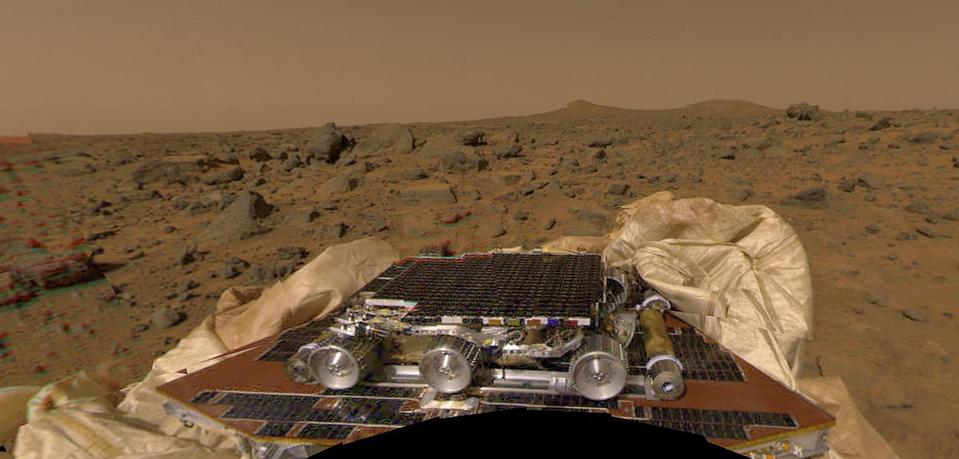
Sojourner – is a historic, the first in history, successful Mars rover sent by NASA as part of the Mars Pathfinder mission. It landed on the Red Planet on July 4, 1997, in the Ares Vallis region (an outwash plain), opening a new era in the exploration of the Solar System. It was very small, comparable to a microwave oven. It weighed only 10.5 kg (23 pounds). It moved on six wheels and drew energy from solar panels. It had front and rear cameras and a spectrometer (APXS) for rock and soil analysis. Designed for 7 days, it operated for as many as 83 sols (Martian days), which is over 12 times longer than planned. The last contact occurred on September 27, 1997.
Achievements:
Traveled over 100 meters.
Transmitted over 550 photos (and the lander 16,500).
Performed over 15 chemical analyses of rocks and soil.
Studied the mechanical properties of the soil and atmosphere.
Sojourner proved that small, mobile robots can effectively study the surface of Mars, paving the way for much larger rovers such as Spirit, Opportunity, Curiosity, and Perseverance.
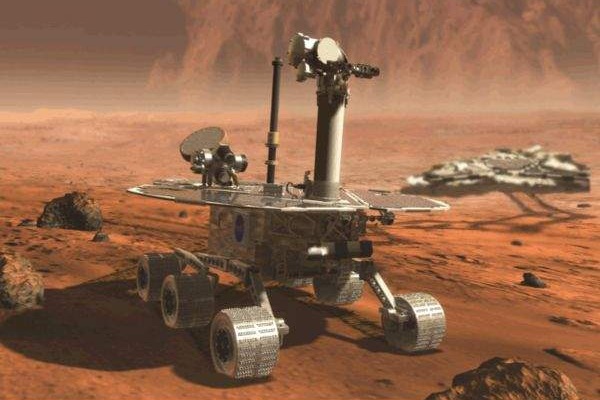
Spirit (MER-A) – is one of two NASA rovers (alongside Opportunity) launched in 2003 as part of the Mars Exploration Rover mission. It landed on Mars on January 4, 2004, to search for signs of past water and traces of life. It operated for over 6 years (originally planned for 90 days). In terms of Martian sols, this was 2210 sols. It covered over 7 km. Its mission significantly contributed to a better understanding of the Red Planet. It confirmed that liquid water existed on Mars in the past, analyzed the composition of rocks and the Martian wind. In 2009, it got stuck in soft sand, and on March 22, 2010, contact was lost due to low temperatures and lack of solar energy. NASA announced the end of the mission in 2011.
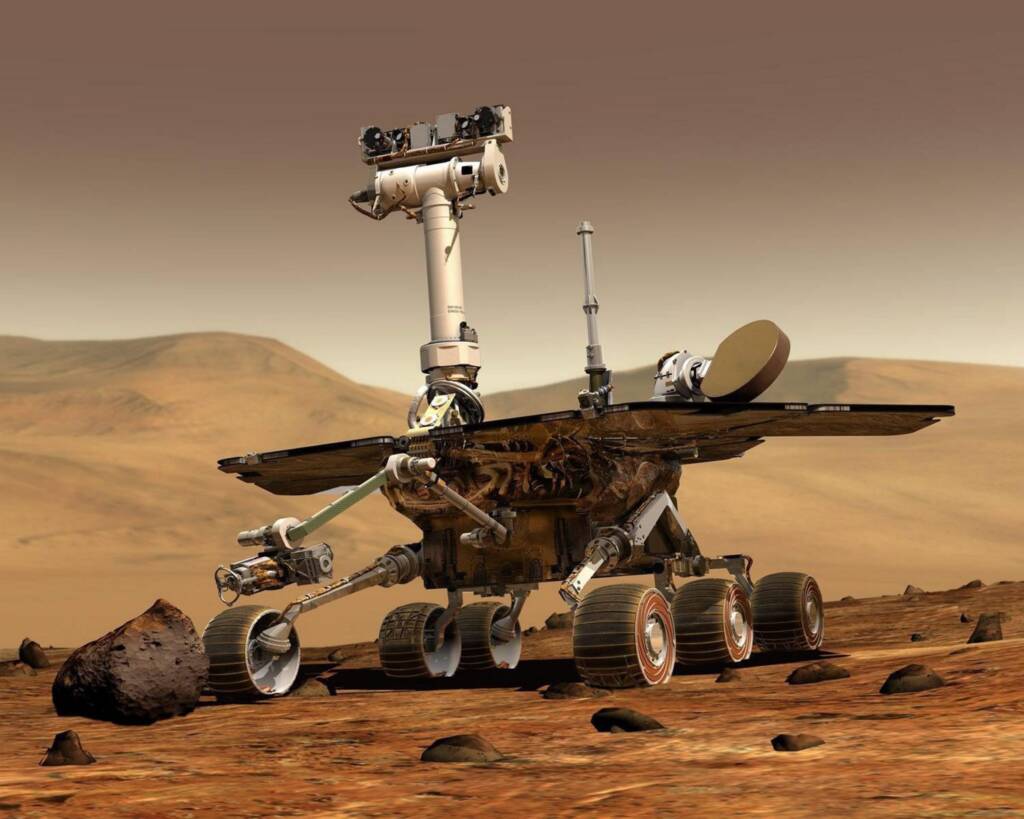
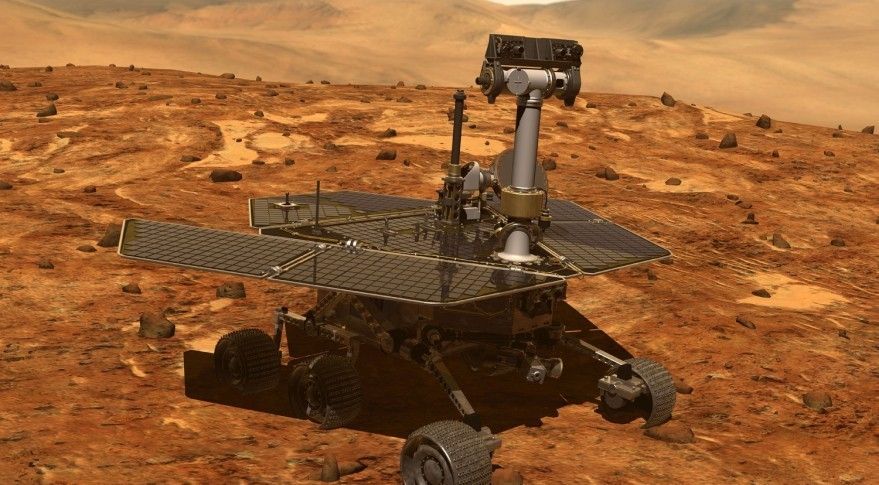
Opportunity (MER-B) is a legendary, solar-powered robot that explored Mars from 2004 to 2018. It landed on the Red Planet on January 25, 2004, in Meridiani Planum. Planned for 90 days, it worked for over 15 years, traveling over 45 km and providing key evidence for the existence of past water on the surface of the Red Planet.
It proved that aquatic environments once existed on Mars, potentially favorable to microbial life. It has a record 45.16 km traveled on the surface to its credit. Its mission was ended by a global dust storm. The loss of communication after the dust storm in June 2018 was the reason for the official termination of the mission by NASA on February 13, 2019. The last message received from Opportunity was: “My battery is low and it’s getting dark” (interpretation of the last report).
Despite this, Opportunity (affectionately called “Oppy”) became a symbol of endurance, significantly exceeding the planned scientific goals.
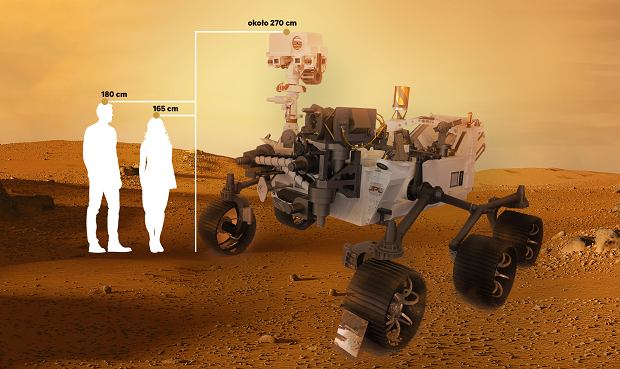
Curiosity – is a NASA rover, part of the Mars Science Laboratory (MSL) mission, which landed on August 6, 2012, in Gale Crater, using an innovative “sky crane” system. The goal of the mission was the analysis of the Martian environment, geological research, and searching for traces of life, including organic components.
This vehicle, weighing 900 kg and the size of a car, was equipped with advanced scientific instruments such as cameras, spectrometers, and a drill for collecting rock samples. The vehicle is powered by a radioisotope thermoelectric generator (RTG), which allows it to operate regardless of the time of day or dust storms.
The mission was planned for 2 years, but due to its excellent technical condition, the rover is still operational. It discovered that conditions suitable for bacterial life existed on Mars in the past, and it also finds traces of organic compounds. Curiosity played a key role in preparing the ground for the newer mission of the Perseverance rover (which landed in 2021), which uses technological solutions tested by its predecessor.
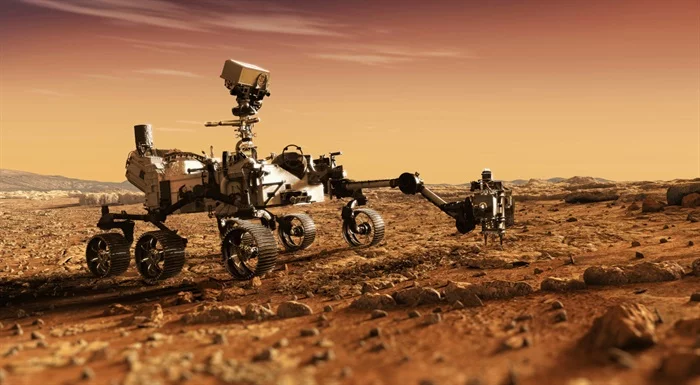
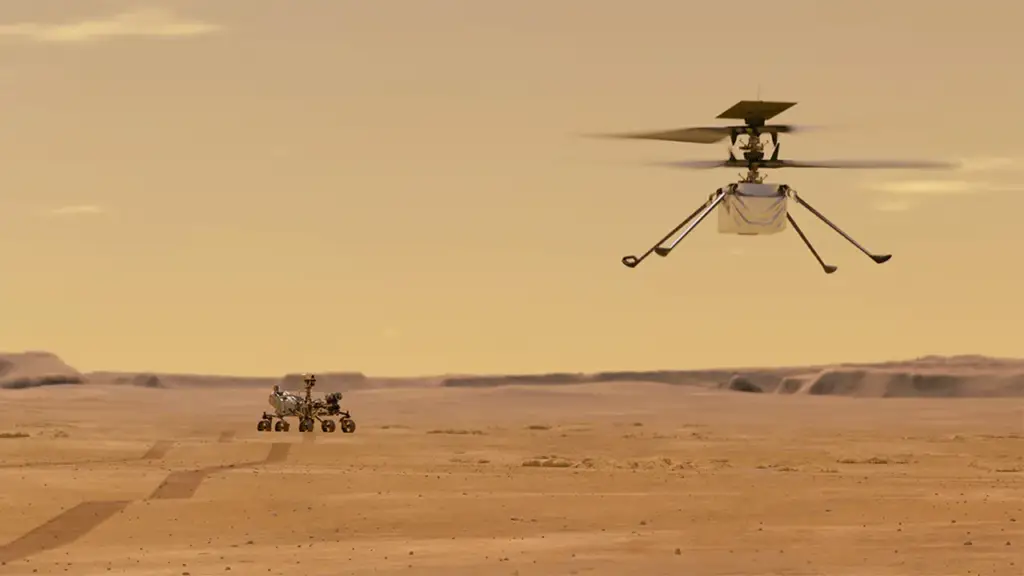
Perseverance – is NASA’s most advanced rover. It landed on Mars on February 18, 2021, in Jezero Crater as part of the Mars 2020 mission.
Its main task is astrobiology, including searching for signs of ancient life, analyzing the climate and geology of Mars, and preparing for future manned missions.
While analyzing the planet’s geology, it found organic compounds – “potential biosignatures” (possible traces of ancient life) and collected samples for future transport to Earth. It searches for traces of ancient bacterial life and collects rock samples.
It is based on the Curiosity design. In December 2025, it performed the first-ever drives fully planned by artificial intelligence without human involvement.
The vehicle breaks records in the speed of movement on the surface of Mars (daily drives). Along with Perseverance, the small helicopter Ingenuity arrived on Mars, which performed the first flight on another planet.
The rover continues to conduct intensive research, exploring the crater in search of answers to the question of extraterrestrial life.
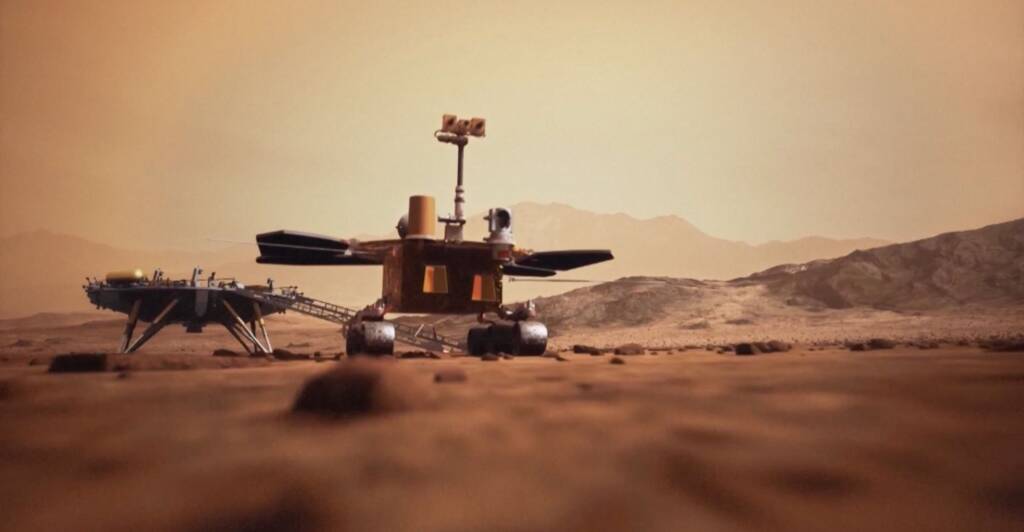
Zhurong – is the first Chinese Mars rover, which landed on the Red Planet on May 14, 2021 (lander) and May 22, 2021 (rover egress) on Utopia Planitia, as part of the Tianwen-1 mission. The goal of the mission was to study geology, search for water in liquid/ice state, and analyze the atmosphere on Mars. Evidence of coastal sediments was found, suggesting the presence of an ancient ocean and potential traces of salt water.
It was 1.85 m tall, had a mass of 240 kg, six wheels, and solar propulsion. China became the third country (after the USSR and the USA) to successfully land and operate a rover on Mars.
After driving about 2 km, it entered sleep mode in May 2022 due to low temperatures and dust on the solar panels, and attempts to wake it up in early 2023 were unsuccessful.
Zhurong provided priceless scientific data, including taking a selfie with the lander and transmitting panoramic photos of the surface. The data it provided during its year of activity is still being analyzed and provides evidence for the existence of an ancient ocean on Mars.
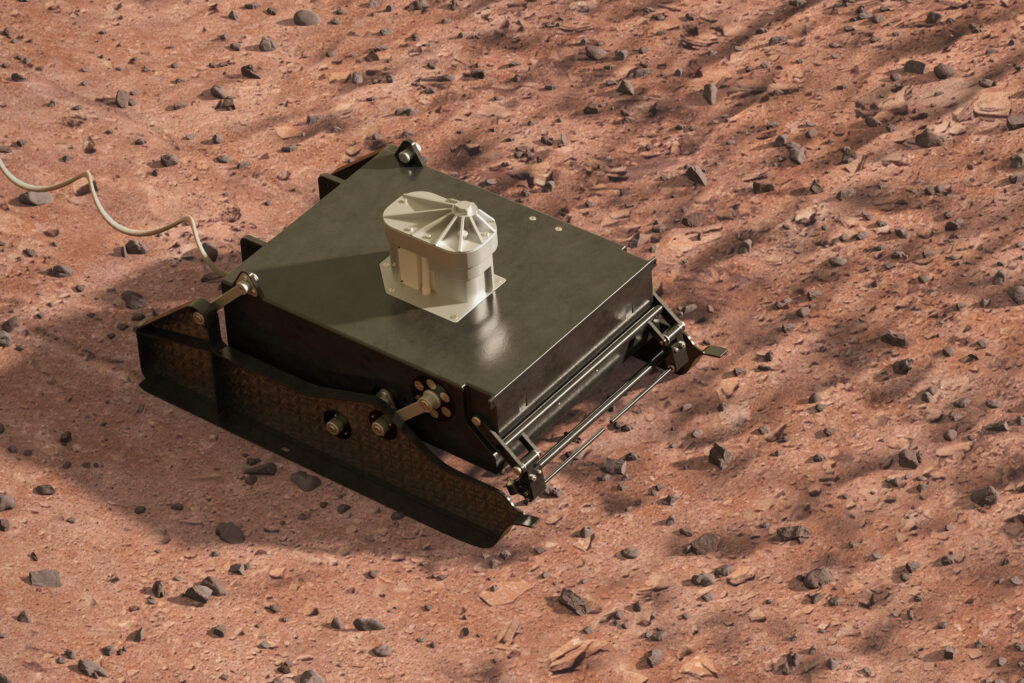
Prop-M – is the name of small Soviet Mars rovers designed as part of the Mars program (missions 2 and 3) in 1971. Although they had a chance to become the first vehicles on another planet, these missions ended in failure, and the rovers themselves never began surface research.
The rovers were part of the Mars 2 & Mars 3 landers. On November 27, 1971, the rover was destroyed during the failure of the Mars 2 lander, which crashed on the surface of Mars. Mars 3 was the first probe to perform a soft landing on Mars (December 2, 1971). Unfortunately, about 20-110 seconds after landing, the lander stopped transmitting a signal (likely due to a giant dust storm or power failure). Prop-M was never deployed (released) onto the surface.
Prop-M was extremely small (mass approx. 4.5 kg) and had a very unusual appearance – it resembled a box with “legs” or “ski runners”. Unlike modern wheeled rovers, Prop-M was intended to “walk” on the surface using two runners to avoid getting stuck in soft Martian dust. The rover was connected to the lander by a 15-meter cable (umbilical cord), through which it received power and transmitted data. It was meant to move within the range of the lander’s camera, and its simple sensors (penetrometer and densitometer) were intended to study the properties of the Martian soil.
Although they had a chance to become the first vehicles on another planet, these missions ended in failure, and the rovers themselves never began surface research. The presence of the rovers was secret for 20 years; information about them was not disclosed until 1990. Prop-M preceded the first successful American rover, Sojourner, by 26 years.